
В этой статье я хочу поделиться своим пониманием устройства и базовых принципов, лежащих в основе работы современного рыбопоискового эхолота. Мы разберем, как это оборудование помогает решать практические задачи на промысле, и заглянем в его техническую суть.
Так на экране сонара может отображаться подводная обстановка.
Что такое эхолот и как он работает
Сердцем любого гидролокатора является приемопередающий модуль. Его задача — генерировать и посылать в толщу воды короткие звуковые импульсы, а затем улавливать сигналы, которые отразились от встреченных на пути объектов. Эти импульсы в профессиональной среде часто называют «пингами» из-за характерного звучания.
Направляя акустический «луч», подобно лучу прожектора, можно определить не только наличие объекта, но и его местоположение. А измерив время между отправкой «пинга» и возвращением эха, легко вычислить расстояние до цели. Весь этот процесс и называется эхолокацией.
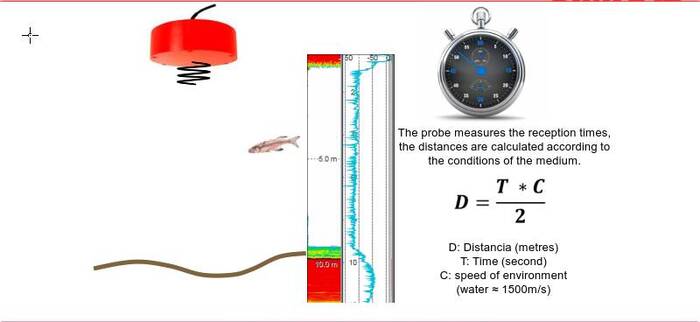
Схематичное представление принципа измерения расстояния.
Изначально созданные для нужд промысла, эхолоты решают целый комплекс задач: от поиска косяков рыбы и оценки их плотности до контроля за орудиями лова. Современные устройства также с высокой точностью измеряют глубину и картируют рельеф дна, что позволяет отнести их к категории многофункциональных гидроакустических станций.
Особенности распространения звука в воде
Ключевой момент в работе эхолота — поведение звуковых волн в водной среде. Их скорость напрямую зависит от температуры, солености и давления. К примеру, на мелководье в морской воде она колеблется от 1440 до 1520 м/с, а в пресной составляет около 1430 м/с. На глубине в 1000 метров скорость стабилизируется примерно на отметке 1480 м/с.
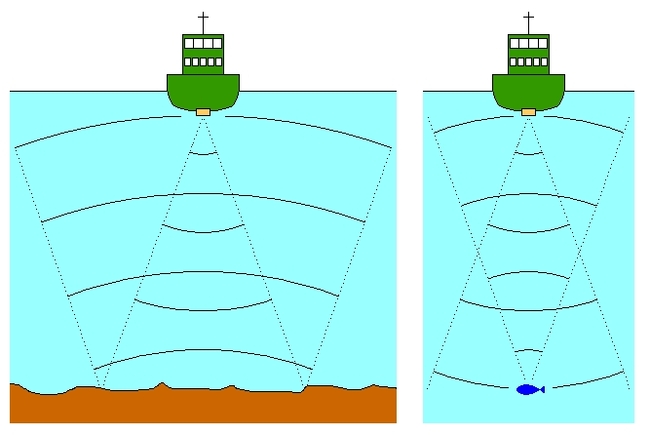
Диаграмма, иллюстрирующая импульсное излучение.
Сонар излучает мощные импульсы звука. От твердой и ровной поверхности, как от дна, они отражаются подобно свету от зеркала. Энергия волны рассеивается по мере удаления, охватывая все большую площадь. Интересно, что при удвоении дистанции зона охвата увеличивается вчетверо. Крупные и плотные косяки рыб также дают четкое отражение, подчиняющееся квадратичному закону (20 log TVG).
Ситуация с одиночной рыбой иная. Ее плавательный пузырь рассеивает звук во всех направлениях, и отраженный сигнал подчиняется уже другому, неквадратичному закону (log TVG -40). Также нельзя забывать о поглощении звука водой. В морской воде оно значительно выше, чем в пресной, и сильно возрастает с увеличением частоты излучения. Например, на частоте 38 кГц потери в морской воде составляют 10 дБ/км против 0.5 дБ/км в пресной. Для корректной работы эхолота в его настройках необходимо учитывать тип водоема.

График, показывающий зависимость скорости звука от температуры и солености воды.
Как выглядит эхо от дна
Ровное и твердое дно возвращает короткий и четкий сигнал, почти копию отправленного импульса. Если же дно имеет уклон, эхо-сигнал становится длиннее, с более плавным нарастанием и спадом, так как звуковая волна последовательно отражается от разных точек склона. Мягкое дно, состоящее из ила, песка или глины, на эхолоте часто отображается в виде многослойной цветной полосы из-за частичного проникновения и отражения сигнала от разных слоев.
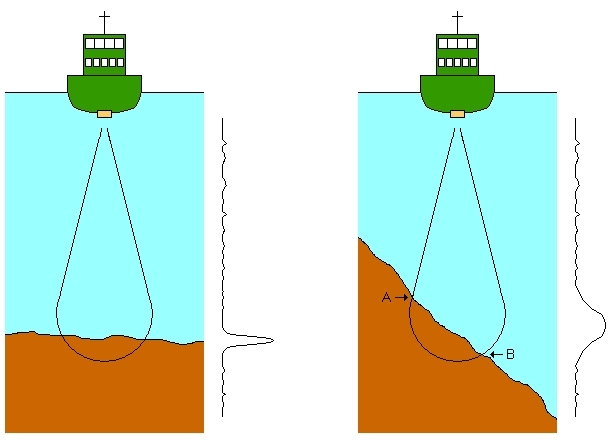
Разница в отражении сигнала от ровного и наклонного дна.
Из чего состоит современный эхолот
Рыбопоисковый эхолот — это комплекс взаимосвязанных устройств. Его основными блоками являются:

Универсальный приемопередатчик (GPT)
GPT — это компактный и многофункциональный блок, который обычно размещают на судне как можно ближе к излучателю, чтобы минимизировать помехи в кабеле. В его состав входят платы передатчиков, цифровой сигнальный процессор (DSP), платы ввода-вывода и питания.
Пример приемопередатчиков от компании Simrad.
С блоком управления GPT соединяется по Ethernet. Рабочая частота устройства задается установкой соответствующих плат, а преобразователи могут быть рассчитаны на разные резонансные частоты (например, 28, 38, 200 кГц) и иметь различную конструкцию лучей.
Способы модуляции сигнала
Многие эхолоты используют простую амплитудную модуляцию (CW), излучая одиночные импульсы фиксированной длительности. Однако современные решения, такие как передатчики Simrad WPT, могут работать и в режиме частотной модуляции (FM). Это дает значительные преимущества: отношение сигнал/шум повышается в разы, улучшается четкость отображения объектов и разрешение на больших глубинах, а также появляется возможность более точно определять размер рыбы. Суть в том, что в рамках одного «пинга» можно гибко менять параметры импульса.
Обратите внимание: Мой опыт работы гидом заграницей.
Гидроакустический преобразователь (излучатель)
Эффективность всей системы во многом зависит от правильной установки излучателя. Необходимо минимизировать влияние шума гребных винтов, гидродинамических потоков и электрических помех. Вот ключевые рекомендации по монтажу:
Используйте экранированный кабель, причем экран должен быть подключен только к соответствующему контакту на GPT и не контактировать с корпусом судна по всей длине.
Размещайте преобразователь в носовой части судна (не дальше трети длины от носа), со стороны, где лопасти винта движутся вверх. Желательно немного наклонить его, чтобы рабочая поверхность оказалась ниже линии вращения винта.
Следите за состоянием гребного винта — его гладкая поверхность снижает кавитационные помехи.
Для уменьшения гидродинамических шумов устанавливайте излучатель на достаточном расстоянии от киля (от 0.6 м на судах длиной более 20 м).
Если эхолот многоканальный, все преобразователи следует устанавливать в одной зоне.
Избегайте наличия выступающих элементов вблизи датчика.
После установки покройте преобразователь качественной антикоррозионной краской.
Различные типы гидроакустических преобразователей.
Преобразователи делятся на активные (приемо-передающие) и пассивные (только приемные), а также могут быть узконаправленными или широколучевыми, однолучевыми или многолучевыми.
Чтение эхограммы
Интерфейс программного обеспечения эхолота SIMRAD ES 70 с примером эхограммы.
На эхограмме, как на приведенном примере, информация часто отображается для разных частотных каналов. Верхняя часть экрана может показывать ситуацию в поверхностном слое, а нижняя — детализировать обстановку у дна.
Оценка размера рыбы с помощью разделенного луча
Для точного определения размеров отдельных особей используются преобразователи с разделенным лучом. Такой излучатель разделен на четыре независимых сектора (квадранта). При приеме эхо-сигнала от рыбы, расположенной не строго по центру луча, волновой фронт достигает разных квадрантов в разное время, создавая сдвиг фаз между сигналами. Анализируя эту разность фаз, процессор вычисляет точное положение рыбы в луче и компенсирует разницу в чувствительности, что позволяет определить ее истинный размер, а не просто силу отраженного сигнала.
Рыба А находится в центре луча, где чувствительность максимальна, а рыба Б — с краю, где чувствительность ниже. Без коррекции их эхо-сигналы будут разной силы, даже если рыбы одинаковы. Сонар с разделенным лучом учитывает положение и корректирует показания.
Важно помнить, что этот метод работает только для одиночных, изолированных рыб. В плотном косяке, где эхо приходит одновременно от множества особей, фазовые углы становятся случайными, и достоверно оценить размер каждой рыбы невозможно.
Как регулируется усиление сигнала
В эхолотах применяются два основных принципа регулировки усиления: прямое усиление сигнала и TVG (Time Varied Gain — усиление, изменяемое во времени).
Прямое усиление — это просто изменение уровня сигнала в приемнике. Основная же задача TVG — компенсировать затухание сигнала с расстоянием, чтобы отображение рыбы на экране не зависело от ее глубины. Уровень (или цвет) эхосигнала от одинаковой рыбы на разной глубине будет примерно одинаковым. Часто эта функция реализуется программно уже после оцифровки сигнала.
На что влияет частота и какова зона обзора
Выбор рабочей частоты — это всегда компромисс между детализацией и дальностью. В соленой воде высокие частоты сильно поглощаются. Поэтому для максимального обзора и работы на больших глубинах выбирают низкочастотные преобразователи с высокой мощностью и большими размерами.
Сравнение типичных зон обнаружения для преобразователей Simrad на разных частотах.
На рисунке наглядно показано: низкочастотный датчик (27 кГц, 3000 Вт) может обнаружить треску на глубине до 800 м, а дно — до 3800 м. Высокочастотный же датчик (200 кГц, 1000 Вт) ту же рыбу «увидит» лишь до 250 м, а дно — до 500 м. Эти расчеты приведены для стандартных условий по температуре, солености и уровню шума судна.
Вместо заключения
В этой статье я постарался раскрыть фундаментальные принципы эхолокации, устройство современных эхолотов и их ключевые функции. Стоит понимать, что тема гидроакустики невероятно обширна, и описанные здесь возможности — лишь основа, на которую накладываются многочисленные современные технологии обработки сигналов и визуализации.
Список использованной литературы
Евтютов А.П., Колесников А.Е., Ляликов А.П и др. - Справочник по гидроакустике (Библиотека инженера-гидроакустика) - 1982 г
Руководство пользователя эхолота Simrad ES 60
Руководство пользователя эхолота Simrad ES 70
Учебный курс SIMRAD 2017 - Теория гидролокации
Больше интересных статей здесь: Туризм.
Источник статьи: Рыбо-поисковые эхолоты, основные функции и принцип работы.